Training Flux.1 Dev on the MI300X GPU with Huge Batch Sizes
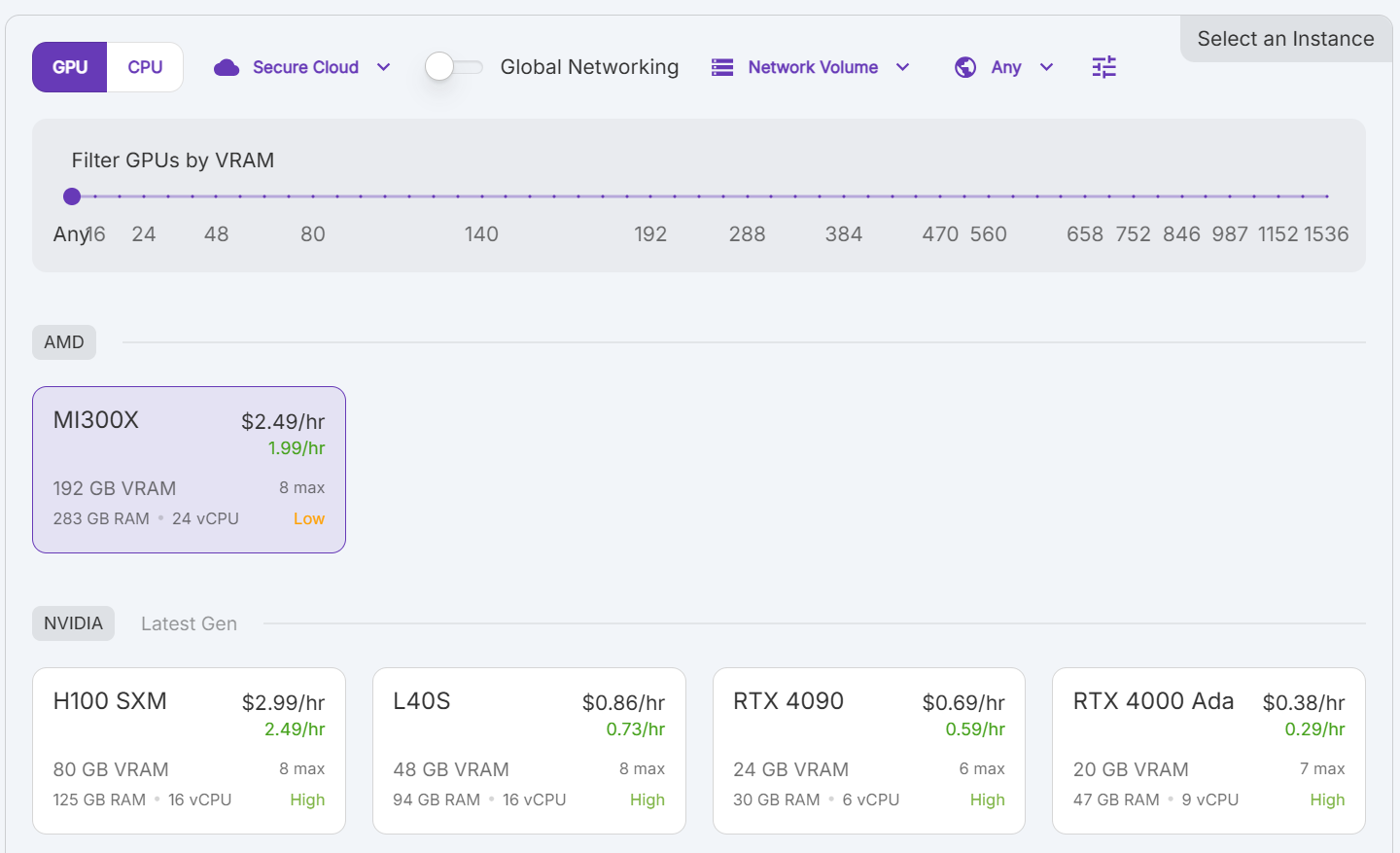
For this post I'm going to be experimenting with fine-tuning Flux.1 Dev on the world's largest GPU, the AMD MI300X. At 192GB of VRAM per GPU, the MI300X allows training at batch sizes and resolutions that no other GPU currently supports.
(While these instructions were written to highlight the AMD MI300X GPUs, everything described in this post will work on the Nvidia H100 and H200 GPUs as well. The maximum batch size will depend on the GPU that you select, but you should be able to run a batch size of at least 16 on the H100 and up to 32 on the H200.)
The Flux.1 models were released in August 2024 and quickly gained popularity for their image quality and ability to follow complex prompts. The Dev model is the largest of the Flux.1 models that can be self-hosted with 12 billion parameters, and one of the highest-quality image models that is currently available for training and fine-tuning.
In this post, I will walk you through the process of setting up a training environment in a Docker container and training Flux LoRAs on RunPod's MI300X GPUs. We will use the kohya-ss/sd-scripts repository to train the model, although this container should be compatible with any training scripts that use PyTorch, if you prefer to use a different training script.
The code for this project along with all associated scripts are available on GitHub at ssube-runpod/onboarding-project.
Batch Size, Epochs, & Steps
While training Flux with larger batch sizes, you will need to adjust the number of epochs in order to reach the desired number of steps. Put simply, increasing the batch size does not increase the amount of data that the model will learn on each step, but it does help increase the generalization of that data and make the model more flexible.
While testing this container and post, I trained Flux.1 Dev in FP8 base mode with a dataset made up of 400 images. The training resolution was set to a target of 1024 with buckets every 128 pixels. All 400 images were resized and placed in the 1280x768 bucket for training.
During training, I measured the peak VRAM usage at various batch sizes to find the largest batch size supported by a single MI300X, which is about 60 images per batch.
| Batch Size | Peak VRAM | Steps per Epoch |
|---|---|---|
| 4 | 27GB | 100 |
| 8 | 39GB | 50 |
| 16 | 63GB | 25 |
| 32 | 112GB | 13 |
| 48 | 162GB | 9 |
| 56 | 186GB | 8 |
| 60 | 196GB | 7 |
Prerequisites
To run this yourself, you will need:
- a RunPod account
- a text editor
- one of:
- a local installation of Docker and a Docker Hub account
- OR Github actions and a Github account
You do not need to run anything locally to complete this tutorial, but if you have a fast network connection, it may be easier to build the Docker container on a local machine with plenty of free disk space.
Pushing the image up to GHCR or Docker Hub may be faster from Github Actions, but you will need to remove some unused dependencies and build tools in order to free up enough disk space to build the container. The total size of the container is about 100GB after it has been built, so make sure you have at least 120GB of free space on your build machine.
If you have limited bandwidth or a slow network connection, I recommend using Github Actions, since the Flux models can be pretty large.
Container
To begin, we need to build a Docker container that contains all of the dependencies required for training Flux. This will include a ROCm-compatible PyTorch installation, the Flux.1 Dev model, and the kohya-ss/sd-scripts repository for training.
There are a few additional scripts that we will be adding to the container to make training easier, which I will explain in more detail later in the post.
In order to build the training container, the Dockerfile will do a few different things:
- Start with the
rocm/pytorchbase image - Download the Flux.1 models from Cloudflare
- Install the
kohya-ss/sd-scriptsrepo for training - Fix a few conflicting dependencies (
boto3andbotocoreversions) - Copy the training scripts to be run
Omitted from the container are the training dataset and the hyperparameters, which will be configured at runtime using environment variables.
Base Container
Building PyTorch can be very time-consuming and prone to version conflicts with the GPU drivers. To help avoid those issues, we will be using the rocm/pytorch base image from Docker Hub.
This base image is quite large, but it contains a working and ready-to-use PyTorch installation that is compatible with ROCm. Recent versions of the image are compatible with the MI300X GPUs that are available on RunPod.
Note: It is important to make sure you do not install a different version of PyTorch during the later steps, since that will usually install the CUDA version of PyTorch, which is not compatible with the AMD GPUs that we will be using.
Flux Model
I am downloading the Flux.1 Dev model from a Cloudflare mirror, but you can download Flux from HuggingFace or another source as long as they follow the format required by the kohya-ss/sd-scripts repository,
with the CLIP-L and T5XXL encoders separated into their own .safetensors files.
In total, the Flux models consume about 32GB of disk space. These are the largest layers that we will be adding to the container and it may take a while to download everything.
/workspace$ ls -lha flux
total 32G
drwxrwxr-x 2 ssube ssube 4.0K Oct 4 02:10 .
drwxrwxr-x 10 ssube ssube 4.0K Feb 1 02:50 ..
-rw-rw-r-- 1 ssube ssube 320M Aug 17 2024 ae.safetensors
-rw-rw-r-- 1 ssube ssube 235M Aug 17 2024 clip_l.safetensors
-rw-rw-r-- 1 ssube ssube 23G Oct 4 02:12 flux_dev.safetensors
-rw-rw-r-- 1 ssube ssube 9.2G Aug 17 2024 t5xxl_fp16.safetensors
Training Scripts
To keep the training container flexible, most of the hyperparameters and configuration options have been moved into environment variables. This makes it easy to change the training configuration without rebuilding the container every time.
There are two scripts that are included in the container that will be used to train the Flux model:
train-main.sh- This script is the main entrypoint for training. It validates the environment variables, downloads the dataset, and launches the training script for the current base model (in this case, Flux.1 Dev).train-flux.sh- This script is the actual training script that will be run bytrain-main.sh. It maps the environment variables to the training script's arguments and launches the training process.
Building the Container
Once all of the prerequisites are ready, you can build the container using the following commands:
> docker build -t your-name/flux-train:latest .
> docker push your-name/flux-train:latest
These commands are wrapped up into the build.sh script in the repository for convenience.
This may take a while, especially if you are pushing the container from a slow network connection. The total size of the container is about 100GB uncompressed, so make sure you have enough free space on your build machine to complete the build (about 120GB should be sufficient).
RunPod Template
Once you have built and pushed the Docker container to Docker Hub or Github Container Registry, we will create a RunPod template to make training easier.
To create a RunPod template, you will need to have a RunPod account and be logged in.
- Open the RunPod console and create a new template.
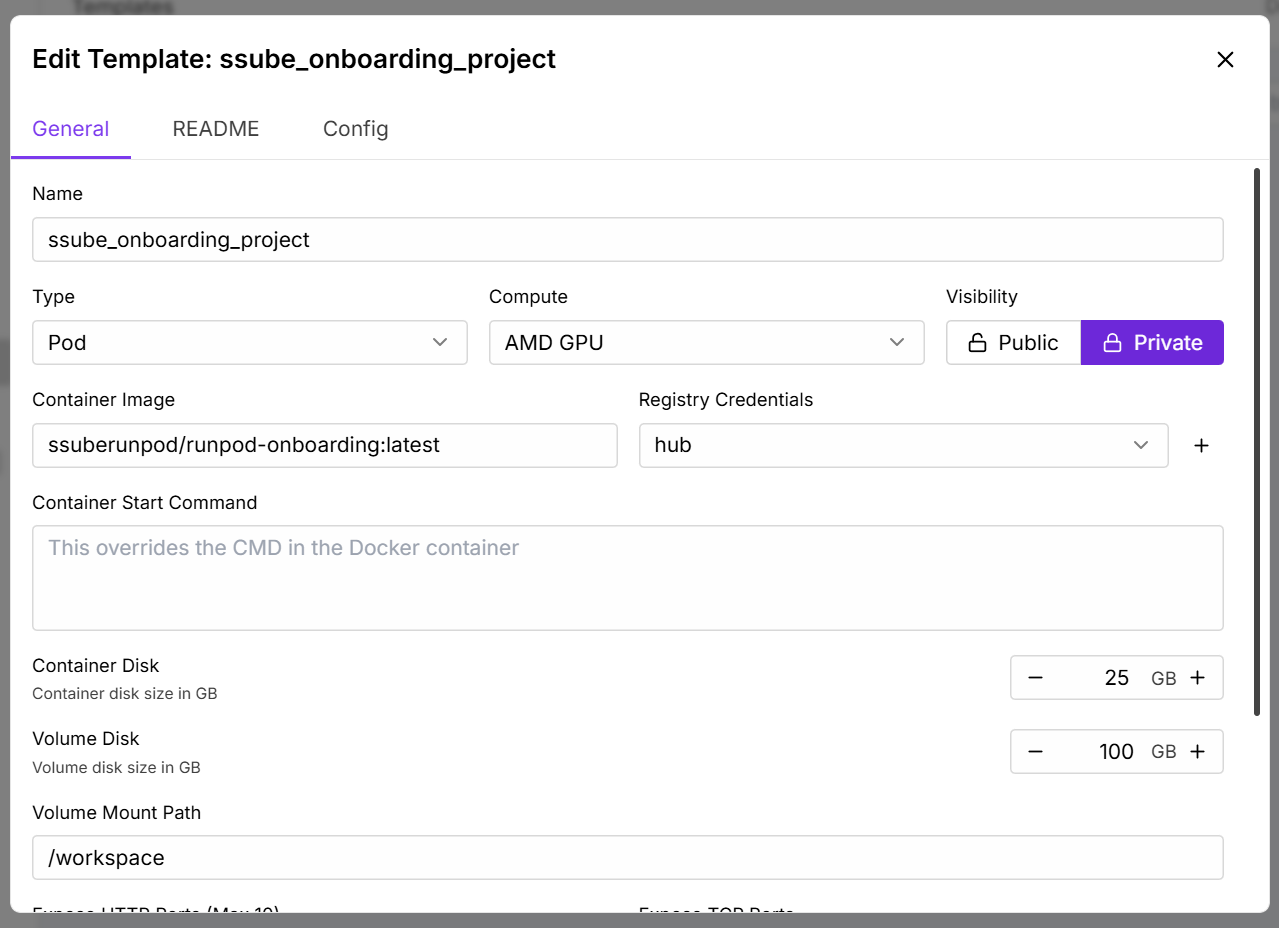
- Enter a memorable name for the template, like
Flux Training. - Select the
Podtype. - Select
AMD GPUfor compute. - You can make the template public or private, depending on your needs.
- Enter the container image that you pushed to Docker Hub or GHCR, like
your-name/flux-train:latest. - Configure the registry credentials if you are using a private container image or a private registry.
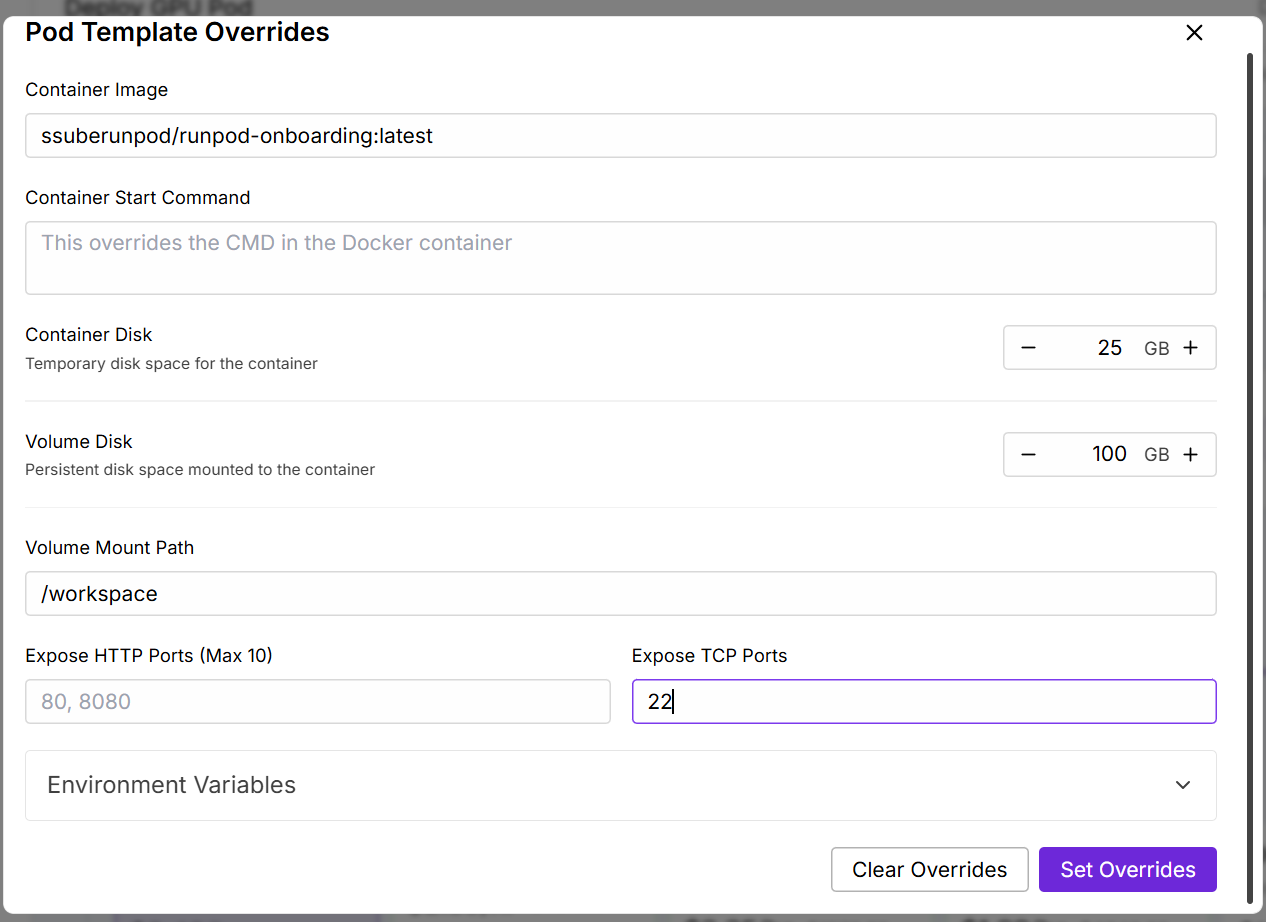
- Set the container disk size to 25GB, we will not be using much local storage.
- Set the volume disk size to 100GB to ensure you have enough space for dataset and output.
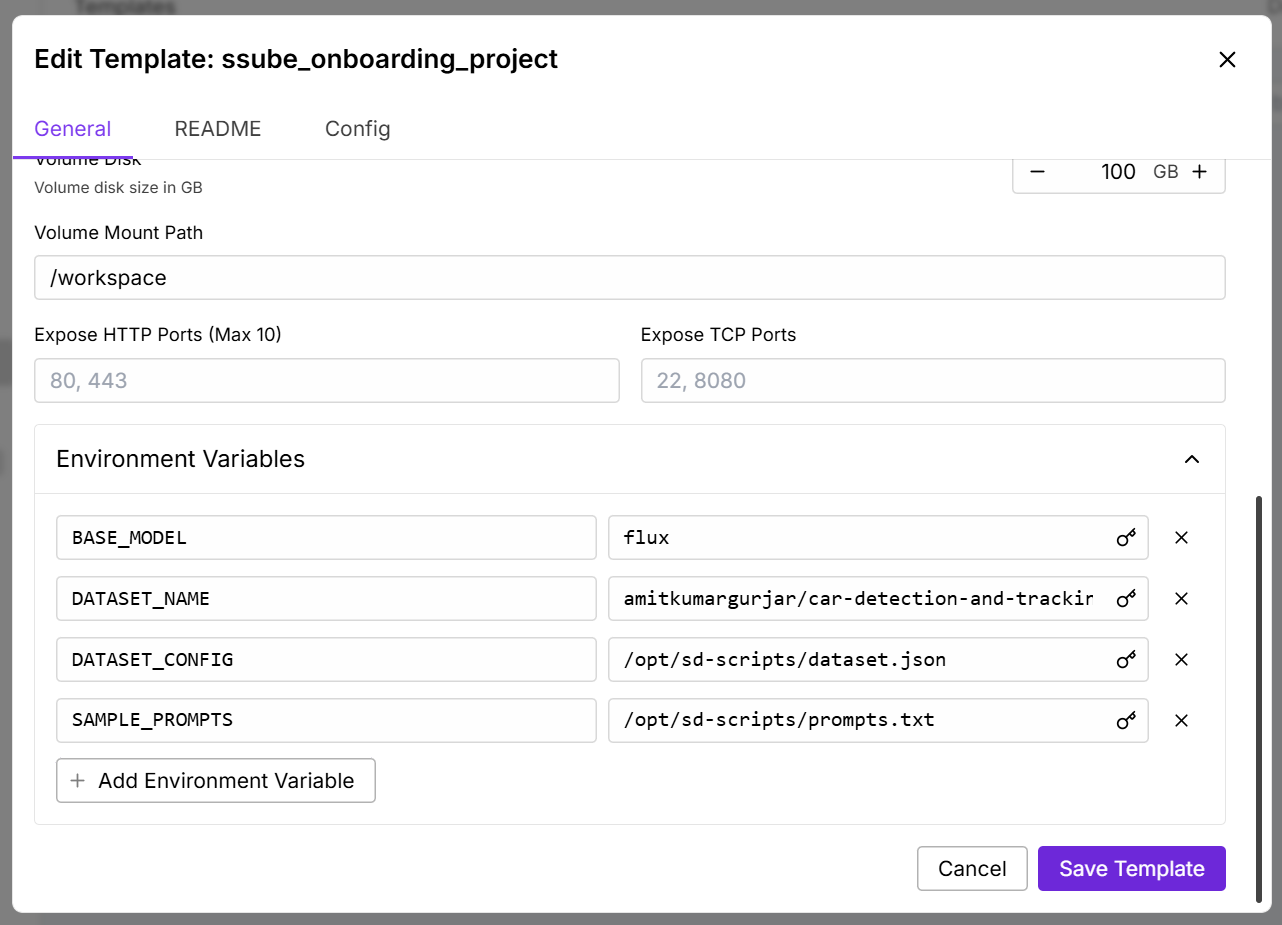
- Set the following environment variables:
BASE_MODEL=fluxDATASET_NAME=your-dataset-name(for example,DATASET_NAME=amitkumargurjar/car-detection-and-tracking-dataset)DATASET_CONFIG=/opt/sd-scripts/dataset.jsonSAMPLE_PROMPTS=/opt/sd-scripts/prompts.txt
Other options can be left at their defaults, but you may want to configure more of the environment variables depending on your training needs.
Environment Variables
There are a number of hyperparameters that you can configure using environment variables. All of them have reasonable defaults, but you can adjust them for each pod and training run until you find the best settings for your dataset.
Some of the available environment variables include:
PARAMS_D_COEF- similar to the learning rate, for the Prodigy optimizer
PARAMS_LEARNING_RATE- general learning rate, should be left at
1when using the Prodigy optimizer
- general learning rate, should be left at
PARAMS_LEARNING_SCHEDULER- learning rate scheduler,
cosineusually works well with the Prodigy optimizer
- learning rate scheduler,
PARAMS_MAX_EPOCHS- the number of epochs to train for. One epoch is one pass through the dataset.
- this should be set based on the size of your dataset and the batch size, with
a target of at least 1000 training steps.
PARAMS_NETWORK_ALPHA- this is similar to a strength parameter for the output LoRA
PARAMS_NETWORK_DIM- the size of the output LoRA
- values between 4-128 generally work well, with 8 or 32 being my personal favorites
PARAMS_NOISE_OFFSET- adds additional noise during training to help the model generalize better
PARAMS_NUM_CYCLES- number of cycles for the learning rate scheduler (only applicable to
cosineand other cyclic schedulers)
- number of cycles for the learning rate scheduler (only applicable to
PARAMS_OPTIMIZER_ARGS- additional arguments for the optimizer, rarely needed
PARAMS_OPTIMIZER_TYPE- the optimizer to use,
prodigyis the default and recommended for easier training
- the optimizer to use,
PARAMS_RESUME_FROM- if you are resuming a previous training run, you can specify the checkpoint here
PARAMS_SAVE_EVERY_N_STEPS- how often to save a checkpoint, in training steps
- I prefer to set this to the number of steps per epoch or a multiple of that, if you want to save more often
- saving is much faster than generating samples, so you can save more often without impacting training speed
PARAMS_SAMPLE_EVERY_N_STEPS- how often to generate samples, in training steps
- I prefer to set this based on the total number of training steps, so that I get about 10 samples per training run
- generating samples will interrupt training for a few minutes, so you don't want to do it too often
PARAMS_SPLIT_QKV- split up the QKV layers while training, which can help the model capture more details
PARAMS_WEIGHT_DECAY- helps to reduce overfitting by enouraging smaller changes
A few other parameters are configured through the dataset.json file, such as batch size and the number of repeats for each dataset. Changing those parameters will require you to rebuild the container.
Training
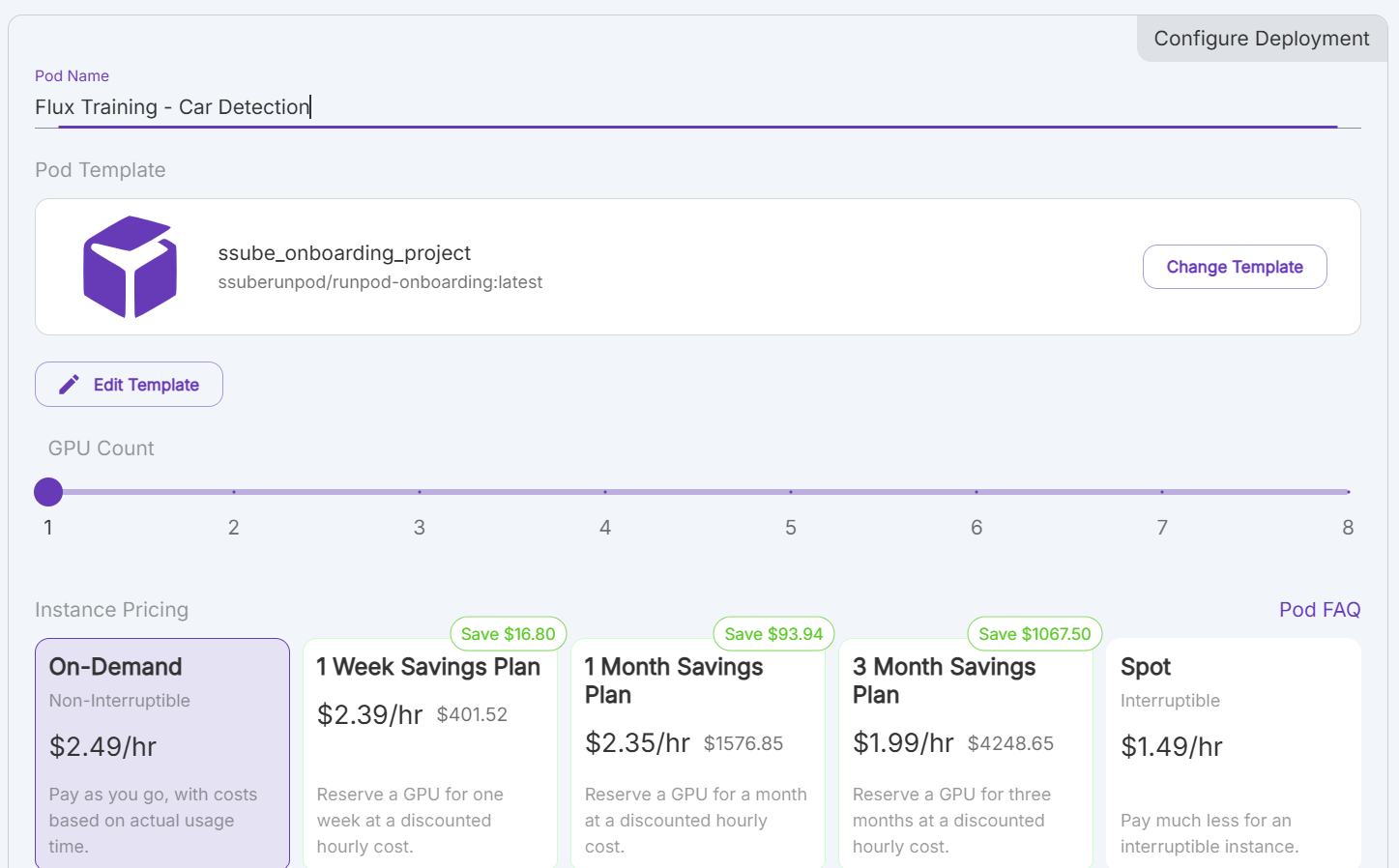
Once you have created a RunPod template, you need to deploy a new pod using that template.
- From the Pods page in the RunPod console, click the
Deploybutton and select the template that you created earlier. - Give the pod a memorable name, like
Flux Training - Car Detection. - Select the number of GPUs to use, 1 is sufficient for this example since the MI300X has so much VRAM.
- Choose your pricing category.
- You can use the
On-Demandcategory for short training runs. - For longer training runs, you may want to use a Savings Plan to reduce the cost.
- If you are willing to let your training run be interrupted, you can use the
Spotcategory to save even more.
- You can use the
- Click the
Deploybutton to start the pod.
Note: If you are going to use SSH or rsync to download the results, you will need to configure the pod to allow SSH access. Make sure you have added your public SSH key to the RunPod console, then add port 22 to the Expose TCP Ports section of the pod configuration. This will limit the number of datacenters where your pod can be deployed, but it will allow you to download the results more easily.
It will take a little while for the container image to be downloaded and extracted, but once that has occurred, the training scripts will download your dataset and automatically start training.
If you want to change any of the training parameters, you can do so by editing the pod configuration and restarting the pod. The training scripts will automatically pick up the new environment variables and restart the training process.
Give the training run a few minutes to get started and wait for the progress bar to stabilize. Once the logs are showing a consistent ETA, you can set yourself a reminder to check back in a few hours to see how the training is going. While you are waiting, you can check the logs in the RunPod console to make that the training is running smoothly and has not encountered any errors, or go for a nice walk and enjoy the fresh air.
Downloading Results
With the default settings for the OUTPUT_PATH environment variable, the training logs and checkpoints will be saved to the /workspace/output directory in the pod. You can use our runpodctl tool to transfer files to and from your pods, or you can download the logs and checkpoints using a file transfer tool or backup tool (like rsync or SyncThing).
Please see https://docs.runpod.io/pods/storage/transfer-files for more details on how to transfer files to and from your pods.
If you are using runpodctl to download the results, you will need to run the runpodctl send command from within the pod and pass the output filename of your model to the command:
> runpodctl send /workspace/output/7318cd4a8c75-1740076123.safetensors
Sending '7318cd4a8c75-1740076123.safetensors' (75.7 MB)
Code is: 1234-some-random-words
On the other computer run
runpodctl receive 1234-some-random-words
Then on your local machine, you can run the following command to download the results:
> runpodctl receive 1234-some-random-words
Image Testing
Once the training has completed, you can test the model by generating some images in your favorite AI image generation tool. The LoRAs produced by kohya-ss/sd-scripts are compatible with most of the popular AI art tools, including ComfyUI and Forge.
For ComfyUI, you should copy the .safetensors file that you downloaded from your pod into the models/loras directory in your ComfyUI installation. You should be able to find and use the LoRA through the Load LoRA node.
For Forge, you should copy the .safetensors file that you downloaded from your pod into the models/Lora directory in your Forge installation. You should be able to find the LoRA in the LoRA browser, along with any other LoRAs that you have installed.
When testing the model, you should try a variety of prompts to see how the model responds. You can also try using the checkpoints that were saved during training, because the final checkpoint may not always be the best one for your dataset. In some cases, merging the results of multiple training runs can produce better results than using a single training run.